Science Blog: Game of drones – unmanned aerial vehicles in mineral exploration and geological mapping
Over the last ten years, unmanned aerial vehicles (UAV), commonly called drones, and related systems have rapidly developed. Everyman’s drones are available on store shelves to take photos and videos of holidays, one’s own house and garden, and for many other private reasons. With the general advances in robotics and digitalization, drones have also been increasingly utilized for various commercial applications. This trend can additionally be seen in geosciences. A key question arising for many geoscience applications is whether drones could be used as platforms to carry out more demanding surveys with remote sensing and geophysical sensors that have traditionally been mounted on aircraft or have been carried by workers on the ground. The answer is yes, drones can be used, although the integration of such sensors on drones is not straightforward. The methods themselves are typically well developed, but drones as an aspiring platform pose challenges for operating sensors and performing measurement procedures in proper ways. In particular, the need for small and lightweight sensors with a low power consumption for UAV platforms plays an important role, because they allow flexible low-cost measurements to be performed without a long preparation phase. Another aspect is that legislation, which varies from country to country, affects drone operations. Therefore, it is often difficult in practice for drone-operating companies to provide international services, and it is generally easier to obtain permission for small drones flying at low altitude only. To find a remedy for this, a common EU-wide regulation is currently in preparation. EU drone regulation (EU) 2019/947 defines the rules and procedures for different types of drone operations and is intended to be applied according to the transition period of the regulation on 31 December 2020.
In recent years, many groups all over the world – both in academia and industry – have worked on the integration of various sensor types on drones that are relevant for geological mapping and mineral exploration. Drone-borne survey systems are considered to be especially appropriate for small to medium-sized surveys that are smaller than those carried out with traditional aircraft, but larger than ground-based surveys. The goal of many companies is to offer drone-based services for this market niche.
MULSEDRO project
One of these projects, in which novel drone-borne systems have been developed for mineral exploration, is the EIT RawMaterials-funded upscaling project “Multi-Sensor Drones” (MULSEDRO). The MULSEDRO project started in spring 2017 and ran for over three years. The project was coordinated by the Geological Survey of Denmark and Greenland (GEUS). The other partners were Helmholtz Institute Freiberg for Resource Technology (HZDR-HIF, Freiberg, Germany), Radai Oy (Oulu, Finland), DMT GmbH & Co. KG (Essen, Germany), the Geological Survey of Finland (GTK) and LTU Business AB (Luleå, Sweden).
The goal of the project was to develop lightweight multi-sensor drone systems that are highly flexible and cheap in their data acquisition, whose operation is little restricted by regulations, and which can acquire magnetic and multi- and hyperspectral data particularly relevant for mineral exploration. These sensors were integrated on both multi-copters and fixed-wing drones. Multi-copters allow detailed surveys to be conducted with a particularly high resolution in a short time, whereas fixed-wing drones can survey larger areas of several square kilometres within a few hours.
The multi-copter system was developed by HZDR-HIF and allows survey operation with both a visible and a near infrared (VNIR) hyperspectral camera (Senops RIKOLA hyperspectral) and a three-component fluxgate magnetometer (SENSYS MagDrone R1) (see Fig. 1). The sensors can be easily interchanged within minutes thanks to a quick-release system. In this way, strategies for data acquisition can be adapted to meet the specific needs of the sensors. While magnetic surveying requires a constant speed, hyperspectral imaging favours a “stop – acquire data – go” strategy. Because different minerals, especially Fe alteration minerals and other hydrothermally altered minerals in certain ore deposits, have diagnostic spectral features, multi- and hyperspectral data can be used to detect zones associated with different types of mineralization systems.

The multi-sensor fixed-wing system was developed by the Finnish drone surveying company Radai Oy, which was established in 2013 and has conduced magnetic surveys for customers since 2014. Like HZDR’s multi-copter system, Radai’s magnetic system also uses a three-component fluxgate magnetometer. The magnetic method is probably the most used geophysical exploration and mapping method, enabling investigation of the location, extent, depth, distribution and strength of the magnetizations in question, allowing for assessment of the size of the mineral deposits. For data processing, Radai has developed an advanced processing method called “equivalent layer modelling” (ELM), which accounts for the main corrections of the magnetic measurements (e.g. levelling and heading corrections) and also reduces the errors and noise content in the data. Two 8-channel cameras from the Canadian company Spectral Devices Inc. were chosen as the multispectral sensors. The cameras cover the wavelength range of 435–980 nm in the electromagnetic spectrum. Because the space within the Radai drone’s fuselage is too small to place both cameras at the same time, surveys must be flown twice, once with each camera, to acquire image data in the full spectral range. The resulting multispectral images are stacked during pre-processing to form a 16-channel image mosaic. The resulting images can not only used to characterize mineral distributions along the ground, but high-resolution 3D digital surface models can also be built, which allows detailed investigation of structures and lineaments such as faults and joints. This combination of magnetic and multispectral sensors on the same small fixed-wing drone is a unique drone survey solution and offers various options for advanced data integration.

The technical improvements in drone-based survey systems in the MULSEDRO project can be considered as an important step in establishing geophysical and remote sensing surveys as standard approaches for mineral exploration and geological mapping. In the project, these methods were technically so far improved that they are all ready to perform commercial surveys. Both Radai Oy and the new spin-off company TheiaX currently established by HZDR-HIF will offer high-resolution and multi-sensor drone-borne surveys as services for industrial partners and exploration companies.
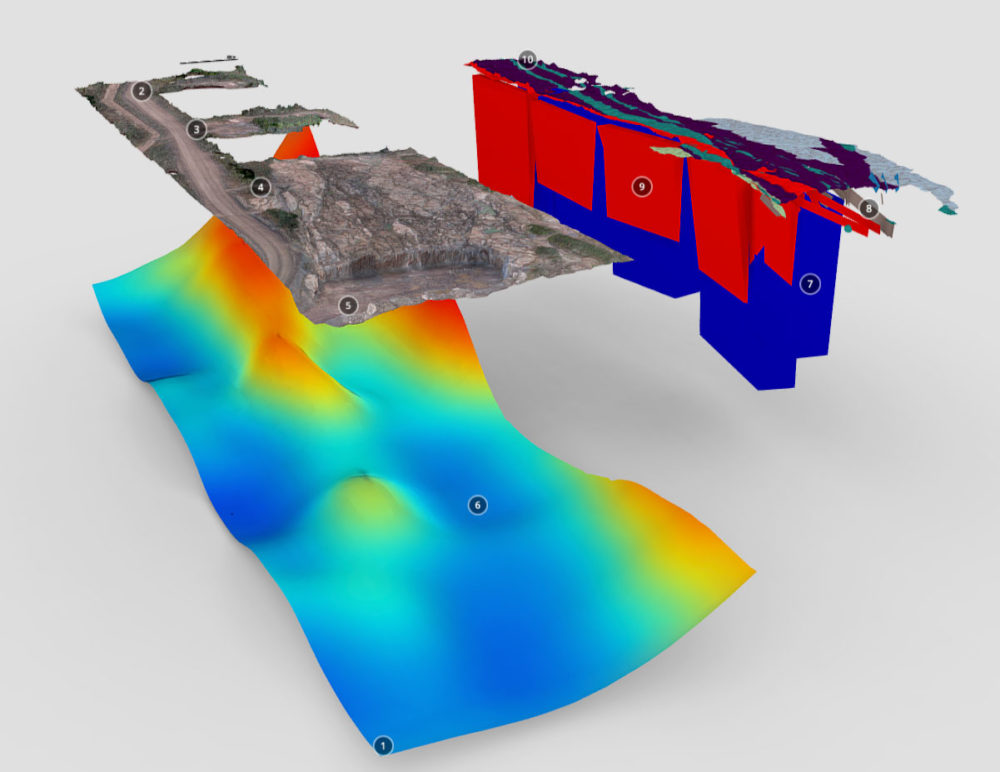
MULSEDRO’s drone systems were tested under real conditions in the mining areas of Otanmäki and Siilinjärvi, Finland, in 2018 and for mining exploration on Disko Island, Greenland, in 2019. The surveys in Otanmäki have been reported and the results are available in more detail in the publications listed below. The results of the field campaign in Greenland will be published in the near future. An example of a 3D model of integrated and interpreted data acquired by the MULSEDRO systems in Siilinjärvi can be seen in Figure 3 and at https://skfb.ly/6U6Xo.
References:
(EU) 2019/947. Commission Implementing Regulation (EU) 2019/947 of 24 May 2019 on the rules and procedures for the operation of unmanned aircraft. http://data.europa.eu/eli/reg_impl/2019/947/oj
Heincke, B., Jackisch, R., Saartenoja, A., Salmirinne, H., Rapp, S., Zimmermann, R., Pirttijärvi, M., Sörensen, E.V., Gloaguen, R., Ek, L., Bergström, J., Karinen, A., Salehi1, S., Madriz, Y., Middleton, M. 2019: Developing multi-sensor drones for geological mapping and mineral exploration: setup and first results from the MULSEDRO project. Geological Survey of Denmark and Greenland Bulletin 43, e2019430302. https://doi.org/10.34194/GEUSB-201943-03-02
Jackisch, R. Drone-based surveys of mineral deposits. Nat Rev Earth Environ 1, 187 (2020). https://doi.org/10.1038/s43017-020-0042-1
Jackisch, R., Madriz, Y., Zimmerman, R., Pirttijärvi, M., Saartenoja, A., Heincke, B., Salmirinne, H., Kujasalo, J.-P., Andreani, L. & Gloaguen, R. 2019. Drone-Borne Hyperspectral and Magnetic Data Integration: Otanmäki Fe-Ti-V Deposit in Finland. Remote Sensing 11(18), p. 2084. Available at: https://doi.org/10.3390/rs11182084
Jackisch, R., Pirttijärvi, M., Salmirinne, H., Kärenlampi, K., Heincke, B., Jylänki, J., Zimmermann, R., Sørensen, E. V., Middleton, M., Madriz, Y. & Gloaguen, R. 2019. Acquisition and Processing Report of the MULSEDRO EIT RM Project from the Otanmäki Fe–Ti–V Deposit, Finland – UAS and Ground-Based Magnetic and Hyperspectral Investigations in 2018. Geological Survey of Finland, Open File Research Report 87/2019, 93 pages, 84 figures, 7 tables and 8 appendices. http://tupa.gtk.fi/raportti/arkisto/87_2019.pdf
Text: Heikki Salmirinne (GTK), Björn Heincke (GEUS), Robert Jackisch (HZDR) and Ari Saartenoja (Radai Oy)
Heikki Salmirinne (Geological Survey of Finland, Geophysicist, email: heikki.salmirinne@gtk.fi)
Heikki Salmirinne has over 20 years of experience in geophysical surveying and interpretation. From 1991 to 1998, he worked at the University of Oulu in teaching and research. Since 1998, he has worked as a geophysicist at the Northern Finland Office of the Geological Survey of Finland (GTK). Applying diverse geophysical methods in bedrock mapping and mineral potential research has been the main task of his work in GTK’s own projects as well as consultation projects for the mining industry.
Björn Heincke (Geological Survey of Denmark and Greenland, EIT RM MULSEDRO project coordinator. PhD. Geophysicist, email: bhm@geus.dk)
Björn Heincke is an applied geophysicist with experience of a wide range of methods and applications ranging from near-surface applications to mining exploration. One of his particular interests is the integration of various types of geoscience data using techniques such as joint inversion and prospectivity mapping. He completed his PhD at ETH Zurich in Switzerland and afterwards worked at the Geological Survey of Norway (NGU) and GEOMAR, Kiel, Germany. Since 2014, he has been employed as a scientist in the Department of Economic Geology at the Geological Survey of Denmark and Greenland (GEUS).
Robert Jackisch (Helmholtz-Zentrum Dresden-Rossendorf, PhD student in the EIT RM MulSeDro project. MSc. Geoecologist, email: jackis65@hzdr.de)
Robert Jackisch is currently a PhD student at the Helmholtz Institute Freiberg for Resource Technology (HIF) and TU Bergakademie Freiberg (TUBAF). In collaboration with GEUS and GTK, he is undertaking his doctoral studies in the EIT RawMaterials MULSEDRO project. He studied geoecology and hydrogeology at TUBAF, graduating in 2017, and has since worked at HIF. His focus in on remote sensing applications in environmental monitoring and mining, using satellite data and UAV technology.
Ari Saartenoja (Radai Oy, MSc. Applied Mathematics, CEO, email: ari.saartenoja@radai.fi)
Ari Saartenoja has over 5 years of experience as a CEO of Radai Ltd, and over 20 years of experience in project management, customer service, technical development and team management. Ari is a founder of the Radai company. He has been developing new innovative geophysical survey systems for drones since 2012. He graduated from the University of Oulu in 1998, majoring in applied mathematics.
[…] Learn more Success Stories This might interest you New technology removes nitrogen from mine water READ MORE Innovation in the visualisation of 3D/4D geological models READ MORE Teaching about raw materials and geology with Minecraft READ MORE Always up to date? subscribe to newsletter […]